Detection and Estimation (Lec 7~14 summary)
GIST 황의석 교수님 [EC7204-01] Detection and Estimation 강의 정리 내용입니다.
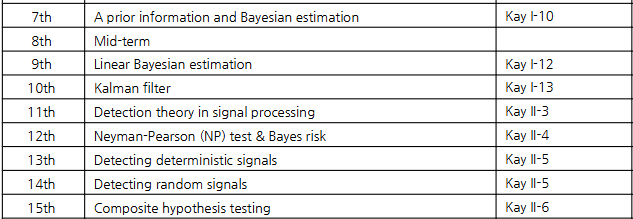
Lec 7: The Bayesian Philosophy
Bayesian 접근법은 매개변수를 확률 변수로 간주하며, 사전 분포(Prior)를 사용
최소 분산 조건이 모든 \(\theta\) 값에 대해 동일하지 않기 때문에 평균적으로 최적인 추정기가 필요
MMSE 추정기: Posterior PDF의 평균, 최적추정기, 추정값 \(\hat{\theta}\)를 계산하는 방법
\[\hat{\theta}_{MMSE} = E[\theta|\mathbf{x}]\]
- Bayesian MSE (Bmse): MMSE 추정기(혹은 다른 추정기 i.e. MAP)를 사용했을 때 달성되는 최소 MSE
\[Bmse(\hat{\theta}) = E[(\theta-\hat{\theta})^2] = E[(\theta - E[\theta|\mathbf{x}])^2]\]
- 사후 평균 계산:
\[p(\theta|\mathbf{x}) = \frac{p(\mathbf{x}|\theta)p(\theta)}{p(\mathbf{x})} = \frac{p(\mathbf{x}|\theta)p(\theta )}{\int p(\mathbf{x}|\theta)p(\theta)d\theta}\]
문제 풀이
MMSE 찾는 문제 (Find the Bayes estimate of \(\mu\), Find MMSE estimator of \(\theta\)…)
최적추정기 \(\hat{A} = E(A|\mathbf{x}) = \int Ap(A|\mathbf{x})dA\) 이고, 여기에서 \(p(A|\mathbf{x}) = \frac{p(\mathbf{x}|A)p(A)}{p(\mathbf{x})} = \frac{p(\mathbf{x}|A)p(A)}{\int p(\mathbf{x}|A)p(A) dA}\) 이므로
이를 계산하기 위해 문제에서 주어진 \(p(\mathbf{x}|A)\) 와 \(p(A)\) 를 이용
Lec 8: General Bayesian Estimators
Review
Introduced the idea of a “a priori” information on \(\theta\) → use “prior” pdf: \(p(\theta)\)
Define a new optimality criterion → Bayesian MSE
Showed the Bmse is minimized by \(E[\theta|\mathbf{x}]\), called “mean of posterior pdf” or “conditional mean”
Overview
Define a more general optimality criterion
→ leads to several different Bayesian approaches
→ includes Bmse as special case
?Why?- Provides flexibility in balancing: model, performance, and computations
…
Bayesian 추정기의 일반화:
Quadratic cost (MMSE): Posterior의 평균 \(\hat{\theta}_{MMSE} = E[\theta|\mathbf{x}]\)
Absolute cost: Posterior의 중앙값
Hit-or-Miss cost (MAP): Posterior의 최빈값
\[\hat{\theta}_{MAP} = \text{arg max}_{\theta} p(\theta|\mathbf{x})\]
\[\rightarrow \hat{\theta}_{MAP} = \text{arg max}_{\theta} p(\mathbf{x}|\theta)p(\theta)\]
\[\rightarrow \hat{\theta}_{MAP} = \text{arg max}_{\theta} [\text{ln} p(\mathbf{x}|\theta) + \text{ln} p(\theta)]\]
arg max 이므로 비례관계만 체크하면서 전개하면 됨
미분해서 0이 되는 값을 찾기
Bayesian 위험 함수 (Risk function):
Bayesian MLE
\(N\rightarrow \infty,\quad \text{arg max}_{\theta} p(\theta|\mathbf{x}) \approx \text{arg max}_\theta p(\mathbf{x}|\theta)\)
\(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\) MAP \(\approx\) Bayesian MLE
최대우도추정(Maximum Likelihood Estimation, MLE)와 최대사후확률추정(Maximum A Posteriori Estimation, MAP)의 차이
MLE: 주어진 데이터 \(\mathbf{x}\)에 대해 파라미터 \(\theta\)가 데이터를 생성할 가능도(Likelihood)를 최대화 하는 값 찾기
\(\hat{\theta}_{MLE} = \text{argmax}_{\theta} p(\mathbf{x}|\theta)\) 데이터 \(\mathbf{x}\) 가 주어진 파라미터 \(\theta\) 하에서 관찰될 확률
직관적 이해: 데이터를 보고 “무엇이 가장 그럴듯한가?”를 판단. 완전히 데이터에 의존, 데이터가 충분하다면 정확한 추정
MAP: 사전 정보(prior)를 고려하여 데이터 \(\mathbf{x}\) 가 주어진 후 파라미터 \(\theta\)의 사후확률(Posterior)을 최대화
\(\hat{\theta}_{MAP} = \text{argmax}_\theta p(\theta | \mathbf{x})\) 베이즈 정리 및 로그를 적용하여 최적화 문제로
\(\rightarrow \text{arg max}_{\theta} [\text{ln} p(\mathbf{x}|\theta) + \text{ln} p(\theta)]\)
직관적 이해: 데이터를 보고 “사전 지식을 포함해서 무엇이 가장 그럴듯한가?”를 판단. 데이터가 적거나 불완전할 때 유리하며 사전 정보를 통해 추정을 보완
MAP는 MLE의 확장!
문제 풀이
MAP 찾는 문제 (Find the MAP estimator of \(\theta\)…)
\(\hat{\theta}_{MAP} = \text{arg max}_{\theta} [\text{ln} p(\mathbf{x}|\theta) + \text{ln} p(\theta)]\)
\(\frac{d}{d\theta}[\text{ln} p(\mathbf{x}|\theta) + \text{ln} p(\theta)]\) 미분해서 0이 되는 값을 찾기
Lec 9: Linear Bayesian Estimation
Overview
MMSE estimator takes a simple form when \(\mathbf{x}\) and \(\mathbf{\theta}\) are jointly Gaussian
→ It is linear and used only the \(1^{\text{st}}\) and \(2^{\text{nd}}\) order moments(mean and covariance).
General MMSE estimator(without the Gaussian assumption) requires multi-dimensional integrations to implement
→ undesirable
What to do if we can’t “assume Gaussian” but want MMSE?
→ Keep the MMSE criteria, but… restrict the form of the estimator to be LINEAR
→ LMMSE Estimator = “Wiener Filter”
Linear MMSE Estimation
Scalar Parameter Case
\[\hat{\theta} = \sum^{N-1}_{n=0} a_n x[n] + a_N\]
Choose \(a_n\)’s to minimize the Bayesian MSE,
\[\text{Bmse}(\hat{\theta}) = E[(\theta-\hat{\theta})^2]\]
→ Linear MMSE (LMMSE) estimator
\(\mathbf{a} = [a_0\ a_1\ ...\ a_{N-1}]^T,\)
\(\text{Bmse}(\hat{\theta}) = C_{\theta\theta} - \mathbf{C}_{\theta x}\mathbf{C}^{-1}_{xx}\mathbf{C}_{x\theta}\)
\(\quad\quad\quad\quad\quad\) (prior - reduce)
\(\hat{Y} = aX + b\) 로 표현?
\[a = \frac{\text{Cov}(X,Y)}{\sigma_X^2}, \quad b=\mu_Y - a\mu_X\]
\(\text{Cov}(X,Y) = E[XY]-E[X]E[Y]\)
GEOMETRICAL INTERPRETATIONS
…
Sequential LMMSE Estimation
- Data model:
\[ x[n-1] = \mathbf{H}[n-1]\boldsymbol{\theta} + \mathbf{w}[n-1] \]
\[\rightarrow \mathbf{x}[n] =\begin{bmatrix}\mathbf{x}[n-1] \\ x[n]\end{bmatrix}=\begin{bmatrix}\mathbf{H}[n-1] \\ \mathbf{h}^T[n]\end{bmatrix}\boldsymbol{\theta} +\begin{bmatrix}\mathbf{w}[n-1] \\w[n]\end{bmatrix}=\mathbf{H}[n]\boldsymbol{\theta} + \mathbf{w}[n]\]
\(\mathbf{x}[n-1]\) 까지의 데이터를 기반으로 구한 추정치 \(\hat{\boldsymbol{\theta}}[n-1]\) 이 있을 때 새로운 데이터 \(x[n]\) 이 들어오면 이를 기반으로 추정치 \(\hat{\boldsymbol{\theta}}[n]\) 을 갱신하는 것
S-LMMSE Estimation: Vector space approach
- \(\tilde{x} = x[1] - \hat{x}[1|0]\) : new information from new sample : innovation
…
…
…
Wiener Filtering
- 평균이 0이고 정상성(\(E[X(t)] = \mu,\quad \text{Cov}(X(t_1), X(t_2)) = E[(X(t_1)-\mu)(X(t_2)-\mu)] = R_{XX}(t_2-t_1),\quad t_2-t_1 = \tau\))을 가진다고 가정
Lec 10: Kalman Filters
Introduction
Wiener filter의 실용적 한계를 해결하기 위해 개발
Three keys to leading to Kalman filter
Weiner filter: LMMSE of signal (only for stationary scalar signals and noises)
Sequential LMMSE: sequentially estimate a fixed parameter
State-space models: dynamical models for varying parameters
Kalman filter: 파라미터 변화는 “상태 공간” 모델을 따른다. but unknown parameter가 시간에 따라 진화할 수 있도록 허용한다.
가우시안 조건에서 최적 MMSE 추정기를 제공. 일반적으로 최적 LMMSE 추정기로 간주
…
Dynamic Signal Models
deterministic parameter로 모델링하면 유효하지 않음 (MVUE에서 분산이 비현실적으로 커짐)
신호간 상관관계를 모델링하여 더 적절한 추정을 수행해야함
이 문제를 해결하기 위해 신호를 랜덤프로세스의 실현(realization)으로 간주하며 베이지안 접근법을 사용
신호평균이 알려져 있다고 가정, 평균을 제거하고 나중에 추가
A simple model to specify the correlation: first-order Gauss-Markov process (직전 상태에만 영향을 받음, \(p(s[n]|s[n-1], s[n-2],...) = p(s[n]|s[n-1])\ \))
Dynamical or state model: 현재 출력은 이전 상태와 현재 입력에만 의존
…
Scalar Kalman Filter
Prediction: \(\hat{s}[n|n-1] = a\hat{s}[n-1|n-1]\)
Minimum Prediction MSE: \(M[n|n-1] = a^2 M[n-1|n-1] + \sigma^2_u\)
Kalman Gain: \(K[n] = \frac{M[n|n-1]}{M[n|n-1]+\sigma_n^2}\)
Correction: \(\hat{s}[n|n] = \hat{s}[n|n-1] + K[n](x[n]-\hat{s}[n|n-1])\) (predict + Kalman Gain(innovation - predict))
Minimum MSE: $M[n|n] = (1-K[n])M[n|n-1]
SCALAR KALMAN FILTER - PROPERTIES
Kalman filter는 sequential MMSE estimator(LMMSE for non-Gaussian)의 확장. \(a=1, \sigma_u^2=0\) 일 경우 칼만 필터의 특수한 형태
No matrix inversions are required
The kalman filter is a time varying filter.: first order recursive filter with time varying coefficients
칼만 필터는 스스로의 성능을 측정
예측단계: 오차 증가, 갱신단계: 오차 감소
기본적으로 1단계 예측을 수행. \(Q_k\rightarrow \infty\)로 가정하면 다중단계 예측도 가능
칼만 필터는 미세조정 시퀀스를 기반으로 동작, 화이트닝 필터로 간주될 수 있다.
가우시안 신호가 아니어도 최적의 LMMSE 추정기로 작동
VECTOR KALMAN FILTER
Wiener Filter 와 Kalman Filter의 비교
Domain: Wiener는 Stationary signals, Kalman은 Dynamic systems
Noise Assumptions: Wiener는 Stationary, PSD known. Kalman은 White Gaussian, known covariances
Model: Wiener는 PSD-based, Kalman은 State-space equations
여기부터 Detection
Lec 11: Statistical Decision Theory 1
Overview
Theory of hypothesis testing
Simple hypothesis testing problem with completely known PDF
Complicated hypothesis testing problem with unknown PDF
Primary approaches
Classical approach based on the Neyman-Pearson theorem
Bayesian approach based on minimization of the Bayes risk
…
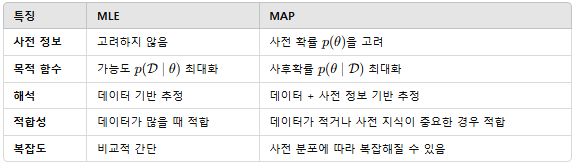
Type 1 Error: \(H_0\)가 참인데 \(H_0\)을 기각 (False Alarm)
Type 2 Error: \(H_0\)을 기각해야 하는데 기각하지 못함 (Miss)
두개의 Error를 동시에 줄이는 것은 불가능
Threshold 를 잡은 시점에서 좌는 \(H_0\), 우는 \(H_1\)
Neyman-Pearson 기준: 고정된 제 1종 오류 확률 \(P_{FA}\) 에서 검출확률 \(P_D\)를 최대화
Type 1/2 오류 확률:
\[P_{FA} = P(H_1;H_0), \quad P_D = P(H_1;H_1) = 1- P(H_0;H_1) = 1-P_M\]
우도비 검정 LRT을 기반으로 임계값 이상일 때 \(H_1\)을 선택
\[L(x) = \frac{p(\mathbf{x};H_1)}{p(\mathbf{x};H_0)} > \gamma\]
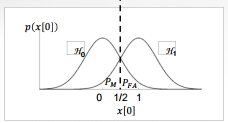
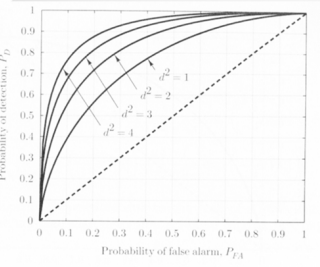
Receiver Operating Characteristics(ROC)
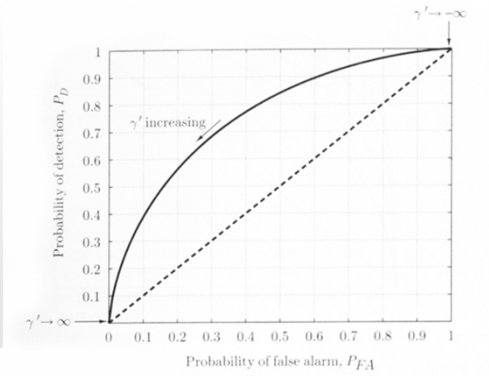
\(P_{FA}\)와 \(P_D\) 간의 관계를 나타냄. 왼쪽 위로 갈수록 좋다.
BAYES RISK
MULTIPLE HYPOTHESIS TESTING
문제풀이
N 구하는 공식 \(\frac{(Q^{-1}(P_{FA})-Q^{-1}(P_D))^2}{SNR}\)
\(SNR = \frac{A^2}{\sigma^2}\)
Lec 12: Deterministic Signal Detection
Overview
Detection of a known signal in Gaussian noise
NP criterion or Bayes risk criterion
The test statistic is linear funtion of the data due to the Gaussian noise assumption
The detector resulted from these assumptions is called the matched filter
…
Gaussian 노이즈에서의 알려진 신호 검출
가우시안 노이즈를 가정한 경우, 매치드 필터가 사용됨
매치드 필터:
Neyman-Pearson(NP) criterion 사용
입력신호와 충돌하지 않도록 주파수 대역에서 신호를 강조하며 최적 SNR 달성
잡음이 없는 경우, 매치드 필터 출력은 단순히 신호 에너지가 됨
Correlator
\[T(\mathbf{x}) = \sum^{N-1}_{n=0}x[n]s[n]\]
Generalized Matched Filters
상관 잡음을 고려한 매치드 필터의 확장
잡음이 non-stationary 일 경우 잡음 공분산 행렬 활용
\[T(\mathbf{x}) = \mathbf{x}^{T}\mathbf{C}^{-1}\mathbf{s} > \gamma'\]
If we let \(\mathbf{s'} = \mathbf{C}^{-1}\mathbf{s},\quad T(\mathbf{x}) = \mathbf{x}^T\mathbf{s'}\) : correlation with modified signal
- Prewhitening …
MULTIPLE SIGNALS
Lec 13: Random Signal Detection
Overview
Detecting random Gaussian signals
Some processes are better represented as random(e.g. speech)
→ Rather than assume completely random, assume signal comes from a random process of known covariance structure
…
랜덤 Gaussian 신호의 검출 (신호가 완전히 랜덤이라기 보다는 공분산 구조가 알려진 랜덤 프로세스로 가정)
추정기-상관기 (Estimator-Correlator):
Generalization of energy detector to signals with arbitarary covariance matrix:
\[ \mathbf{x} \sim \begin{cases} N(\mathbf{0}, \sigma^2 \mathbf{I}) & \text{under } H_0 \\ N(\mathbf{0}, \mathbf{C}_s + \sigma^2 \mathbf{I}) & \text{under } H_1 \end{cases} \]
NP detector:
Decide \(H_1\) if
\[T(\mathbf{x}) = \mathbf{x}^T\hat{\mathbf{s}}>\gamma'', \quad T(\mathbf{x})=\sum^{N-1}_{n=0}x[n]\hat{s}[n]\]
\(\hat{s} = \mathbf{C}_S(\mathbf{C}_s+\sigma^2\mathbf{I})^{-1}\mathbf{x}\)
\(T>\eta\) 일 때 \(H_1\) 선택
LINEAR MODEL
GENERAL GAUSSIAN DETECTION
Lec 14: Statistical Decision Theory 2
Review & Overview
Neyman-Pearson criteria (max \(P_D\) s.t. \(P_{FA}\)=constant) : Likelihood ratio test, threshold set by \(P_{FA}\)
Minimize Bayesian risk(assign costs to decisions, have priors of the different hypotheses) : Likelihood ratio test, threshold set by priors + costs
minimum probability of error = Maximum A Posteriori detection
maximum likelihood detection = minimum probability of error with equal priors
Known deterministic signals in Gaussian noise: Correlators
Random signals: estimator-correlators, energy detectors
All assume knowledge of \(p(x;H_0)\) and \(p(x;H_1)\)
?What if don’t know the distribution of \(x\) under the two hypotheses??what if under hypothesis 0, distribution is in some set, and under hypothesis 1, this distribution lies in another set - can we distinguish between these two?→ Composite Hypothesis Testing
복합 가설 검정(Composite Hypothesis Testing):
Generalized Likelihood Ratio Test(GLRT):
\[\Lambda(\mathbf{x}) = \frac{\text{max}_{\theta\in\Theta_1}f(\mathbf{x}|\theta, H_1)}{\text{max}_{\theta\in\Theta_0}f(\mathbf{x}|\theta, H_0)}\]
UMP 검정: 가능한 모든 매개변수 값에 대해 성능이 최적화된 검정
Homework
hw6
★P1: Find the Bayes estimation of \(\mu\).
- Posterior의 Expection 구하기. \(E[\mu|\tilde{X}]\)
★P2: Find the MAP estimator of \(\theta\) / Find MMSE estimator of \(\theta\)
Posterior의 최빈값 구하기. 지수함수가 단조함수임을 이용해 그림으로. 다른 경우엔.. 11.4 풀이 확인
Posterior의 Expection 구하기. \(E[\theta|y]\)
★P3: Find the MMSE Estimator of \(\theta\)
- conditional independence를 이용하는 문제
(10.4): uniform prior PDF \(\cal{U}[0,\beta]\)가 주어 졌을 때 MMSE estimator of \(\theta\)를 찾고 \(\beta\)가 매우 커졌을 때 어떤 일이 벌어지는 지
- \(\beta\)가 매우 커지면, 즉 사전 정보가 거의 없으면 사후확률분포는 likelihood에 의해 지배되며 \(\theta\)의 MMSE 추정기는 데이터의 최대 관측값 \(x_{max}\)에 크게 의존하게 된다.
(10.12): Joint Gaussian 문제. 최대값, 평균, …
- 정규분포에서 조건부 평균은 최우 추정치와 일치한다.
(11.3): posterior PDF가 주어지고 (지수함수) find the MMSE and MAP
- MAP는 지수함수가 단조함수임을 이용해 그림으로 해결하고 MMSE는 치환적분
(11.4): Find the MAP estimator of A
\(x[n] = A + w[n]\) 신호에 대해 MAP를 찾는 문제,
\(\text{ln}p(A|\tilde{X}) = \text{ln} p(\tilde{X}|A) + \text{ln} p(A)\) 에서 이를 최대화 하는 \(A\)값을 찾기 위해 \(A\)에 대해 미분해서 0이 되는 값을 찾음
(11.16): \(x[n] = A + Bn + w[n]\) 신호에 대해 MMSE estimator를 찾고 Bmse를 계산한 뒤 사전 정보가 A와 B중 어떤 파라미터에 더 큰 benefit을 주는 지.
- prior 분산이 작은 파라미터가 사전 정보로부터 더 많은 이득을 얻는다.
hw7
★P1: \(Y=X^2\) 의 \(X\)에 대한 LMMSE 값을 구하라, 해당 추정값의 MSE를 구하라
★P2: Kalman gain \(K[n]\) 추정 오차 분산 \(M[n]\)을 구하라. / 사전 정보가 없을 경우, 추정 값이 단순히 sample mean이 되는 것을 증명
★P3: 스칼라 상태 - 스칼라 관측 칼만 필터 모델, innovation sequence를 구하고, 이것이 백색 잡음(white noise)인지 여부 판별
(12.1): Quadratic estimator의 coefficient를 구하고 LMMSE 추정기를 구하고 두 추정기의 MSE를 비교
(12.11): \(C^{-1}_{xx}\)와 \(A\)의 관계, Gram-Schmidt, whitening, …
(13.4): 공분산 관계, 공분산 전파 방정식
(13.15): 최적의 l 스텝 예측기, 가우스 마르코브 프로세스, …
hw8
★P1(3.4): DC level in WGN detection 문제에서 \(P_{FA}, P_D, SNR\)이 주어졌을 때 number of samples \(N\) 구하기
\(N = \frac{(Q^{-1}(P_{FA})-Q^{-1}(P_D))^2}{SNR}, \quad SNR = \frac{A^2}{\sigma^2}\)
Q 함수표 이용해야 함
★P2(4.10): 공분산 행렬이 주어졌을 때 Find the matrix prewhitener \(D\)
- 고유값, 고유벡터 계산 및 주어진 식 이용하기 \(C^{-1} = D^TD\) 등
(3.6): Determine the NP detector and its detection performance to show that it is the same as for A>0
- \(T(\mathbf{x})\) 구하고 NP 검출기 계산 후 \(P_{FA}\), \(P_D\) 계산 및 A<0 과 A>0의 성능 비교
(3.12): 두 유니폼 pdf를 가진 가설로부터 Design a perfect detector for problem
- 두 가설의 pdf가 서로 겹치지 않게 설정하여 완벽한 검출기 만들기.
(3.18): Find the MAP decision rule / 각 케이스의 decision regions 를 보이고 설명하기
- MAP 결정 규칙 계산을 위해 우도 함수 계산, 결정 영역 설정…
(4.6): \(s[n] = Ar^n\) in WGN with variance \(\sigma^2\) 신호에 대해 Find NP detector and its detection performance.
- NP 검출기의 가설 설정 및 우도비 검정, 결정규칙을 정하고 … … \(N\rightarrow\infty\) 에서의 성능
(4.19): \(R^2\) 평면에서 최소 오류 확률을 달성하는 결정 영역 그리기, 이 때 사전확률 \(P(H_0)\)과 \(P(H_1)\)이 같지 않을 수 있음
(4.24): 오류 확률 \(P_e\)를 최소화하는 최적 수신기(최적 결정 규칙) 구하기 …
hw9 (Lec 13)
★P1(5.14): Show the NP detector for a Gaussian rank one signal …
Gaussian random process → 신호가 랜덤, Estimator-correlator의 \(\hat{s}\) = \(\mathbf{C}_s(\mathbf{C}_s + \sigma^2 \mathbf{I})^{-1}\mathbf{x}\) 사용!
\(T(\mathbf{x}) = \mathbf{x}^T\mathbf{s}\) … 검정통계량이 \(h^Tx\)가 아닌 \((h^Tx)^2\) 이므로 카이제곱을 써야한다…
★P2(6.2): 두 개의 샘플이 지수분포로 주어져 있을 때 UMP test가 존재하는지 확인하고 \(T(\mathbf{x})\)와 \(P_{FA}\)를 찾아라
- 지수분포 합의 분포
(5.16): Rayleigh fading 환경에서의 수신된 신호를 기반으로 한 ML 추정기 구하기
(5.17): Deflection coefficient, 위상 오차의 영향…
(6.8): GLRT
(6.15): GLRT, Rao Test, Wald test