Detection and Estimation (Estimation part)
GIST 황의석 교수님 [EC7204-01] Detection and Estimation 강의 정리 내용입니다.
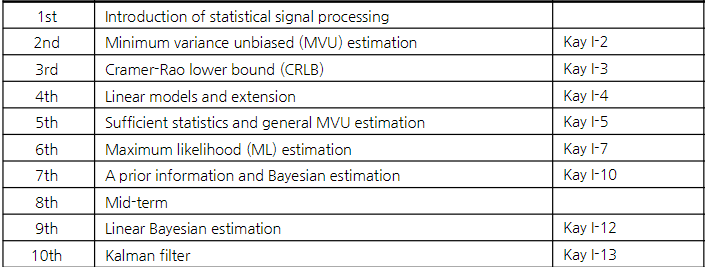
Lec 1. Introduction to statistical signal processing
- Goal of statistical signal processing
Infer value of unknown state of nature based on noisy observations optimally
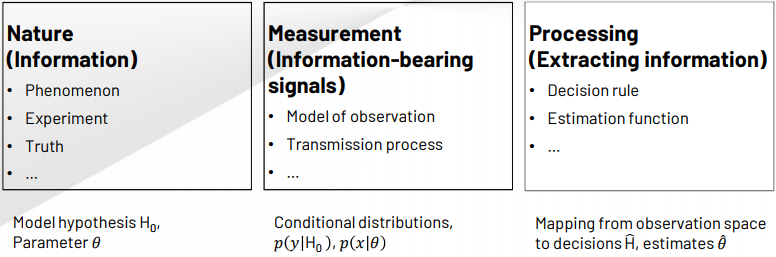
deterministic에서는 \(P(x;\theta), P(y;\text{H}_0)\) . \(\theta\) 와 \(H_0\) 가 fixed 되어있는 문제
Estimation은 Continuous 문제(SOH estimation), Detection은 Discrete 문제(Fault detection)
Both Statistics and Machine Learning are concerned with the same question: How do we learn from data?
Statistics emphasizes formal statistical inference,
Machine Learning emphasizes high dimensional prediction problems
- Difference between detection and estimation …
Estimation: Continuous set of hypotheses (almost always wrong - minimize error instead)
Detection: Discrete set of hypotheses (right or wrong)
Classical(deterministic): Hypotheses / parameters are fixed, non-random
Bayesian: Hypotheses / parameters are treated as random variables with assumed priors (or a priori distributions)
- Random parameter, random value, random state …
- Mathematical estimation problem
Types of estimation
Classical estimation: parameters of interest are assumed to be deterministic.
Bayesian estimation: parameters are assumed to be random variables to exploit any prior knowledge(such as the average of Dow-Jones industrial average is in [2800, 3200])
The data are described with joint pdf \(p(\mathbf{x}, \theta) = p(\mathbf{x} | \theta)p(\theta)\)
Estimator and estimate
Estimator: a rule that assigns a value to \(\theta\) for each realization of \(\mathbf{x}\) (function of random variable \(\mathbf{x} \rightarrow\) random variable)
- function \(g(·)\) , \(\hat{\theta} = g(x)\)
Estimate: the value of \(\theta\) obtained for a given realiztion of \(\mathbf{x}\)
- Assessing estimator performance
Example of the DC level in noise
\(x[n] = A + w[n]\)
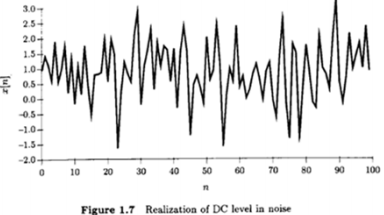
\(A\) : unknown DC level
\(w[n]\) : zero mean Gaussian process \(\sim \mathcal{N}(0,\sigma^2)\)
\(N\) observations \(\{x[0],x[1],...,x[N-1]\}\)
Two candidate estimators (Sample mean vs. first sample value)
\(\hat{A}=\frac{1}{N}\sum^{N-1}_{n=0}x[n]\)
\(\check{A}= x[0]\)
Statistical analysis
Mean
\(E(\hat{A}) = E(\frac{1}{N}\sum^{N-1}_{n=0}x[n]) = \frac{1}{N}\sum^{N-1}_{n=0}E(x[n])=A\)
\(E(\check{A}) = E(x[0]) = A\)
둘다 unbiased
Variance
\(var(\hat{A}) = var(\frac{1}{N}\sum^{N-1}_{n=0}x[n]) = \frac{1}{N^2}\sum^{N-1}_{n=0}var(x[n])\)
\(= \frac{1}{N^2}N\sigma^2 = \frac{\sigma^2}{N}\)
N이 커지면 분산이 작아지는 모습
\(var(\check{A}) = var(x[0]) = \sigma^2\)
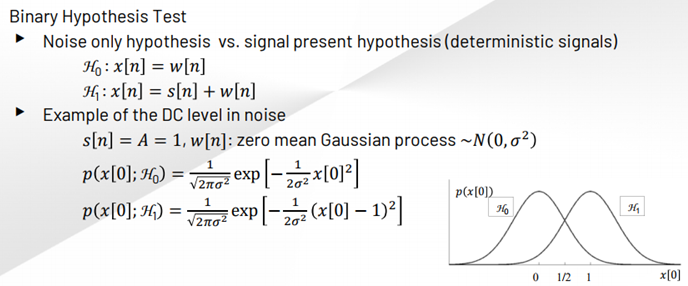
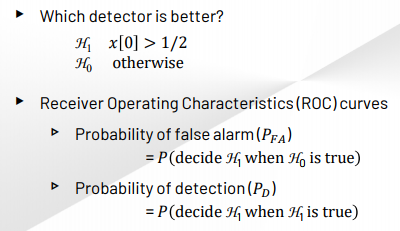
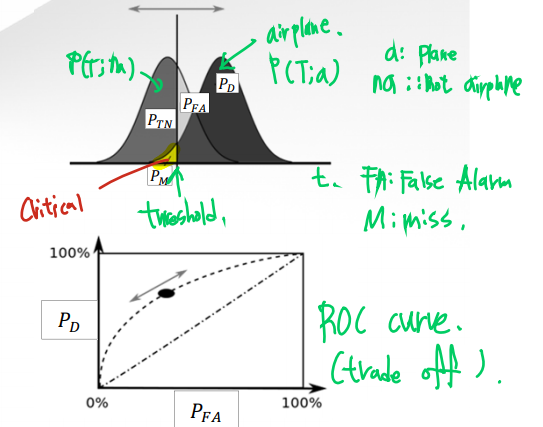
- Mathematical detection problem
Binary Hypothesis Test
- Assessing detector pereformance
Review
Parameter: We wish to estimate the unknown parameter \(\theta\) from observation(s) \(x\). These can be vectors \(\mathbf{\theta} = [\theta_0, \theta_1, ..., \theta_p]^T\) and \(\mathbf{x} = [x[0], x[1], ..., x[N-1]]^T\) or scalars.
Parameterized PDF: the unknown parameter \(\theta\) is to be estimated. \(\theta\) parametrizes the PDF of the received data \(p(x;\theta)\).
When dealing with Bayesian estimators, the notation \(p(x|\theta)\) will be used to highlight the fact that \(\theta\) is a random variable.
Mutual information 관련.. \(\theta\)가 정보가 있으면 \(p(x|\theta)\)는 \(p(x)\)보다 나을 것
Estimator: a rule that assigns a value \(\hat{\theta}\) to \(\theta\) for each realization of \(x\).
Estimate: the value of \(\theta\) obtained for a given realization of \(x\). \(\hat{\theta}\) will be used for the estimate, while \(\theta\) will represent the true value of the unknown parameter.
Mean and variance of the estimator: \(E(\hat{\theta})\) and \(var(\hat{\theta}) = E[(\hat{\theta}-E(\hat{\theta}))^2]\).
Expectations are taken over \(x\) (meaning \(\hat{\theta}\) is random, not \(\theta\).)
\(x\): 항상 랜덤
\(\theta\): 항상 랜덤은 아니지만 랜덤이 될 수 있다. (\(\hat{\theta}\): random)
Classical: fixed (;)
Bayesian: conditional (|)
Lec 2. Minimum Variance Unbiased(MVU) Estimation
Unbiased Estimators
An estimator \(\hat{\theta}\) is called unbiased, if \(E(\hat{\theta}) = \theta\) for all possible \(\theta\).
\(\hat{\theta} = g(x) \Rightarrow E(\hat{\theta}) = \int g(x)p(x;\theta)dx = \theta\)
If \(E(\hat{\theta} \neq \theta)\), the bias is \(b(\theta) = E(\hat{\theta}) - \theta\)
(Expectation is taken with respect to \(x\) or \(p(x;\theta)\))
\(E(\hat{\theta}) = \theta\) may hold for some values of \(\theta\) for biased estimators, i.e., modified sample mean estimator
\(\check{A} = \frac{1}{2N} \sum_{n=0}^{N-1} x[n] \quad \Rightarrow \quad E(\check{A}) = \frac{1}{2}A \begin{cases} = A \text{ if } A = 0 \\ \neq A \text{ if } A \neq 0 \end{cases} \rightarrow\) biased
Unbiased estimator is not necessarily a good estimator;
but a biased estimator is a poor estimator.
- biased estimator \(E[\hat{\sigma}^2]\)
모평균 \(\mu\), 모분산 \(\sigma^2\): Unknown
\(E[x[n]] = \mu\)
\(\text{Var}[x[n]] = \sigma^2 = E[x^2[n]] - E^2[x[n]]\)
\(E[x^2[n]] = \sigma^2 + \mu^2 \cdots (*)\)
\(\bar{x} = \frac{1}{N}\sum^{N-1}_{n=0} x[n]\) (sample mean)
\(E[\bar{x}] = \mu \leftarrow\) unbiased
\(\text{Var}[\bar{x}] = \frac{\sigma^2}{N} = E[\bar{x}^2] - \mu^2\)
\(\rightarrow E[\bar{x}^2] = \frac{\sigma^2}{N} + \mu^2 \cdots (**)\)
\(\hat{\sigma}^2 = \frac{1}{N} \sum^{N-1}_{n=0}(x[n] - \bar{x})^2\)
\(E[\hat{\sigma}^2] = \frac{1}{N} E[\sum^{N-1}_{n=0}(x^2[n])-2\bar{x}\sum^{N-1}_{n=0}x[n] + N \bar{x}^2]\)
\(\quad\quad\quad = \frac{1}{N}E[\sum x^2[n] - N\bar{x}^2]\)
\(\quad\quad\quad = \frac{1}{N}(\sum(E[x^2[n]]) - N E[\bar{x}^2])\) 여기서 (*) 과 (**)에 의해
\(\quad\quad\quad = \frac{1}{N}(N(\sigma^2 + \mu^2) - N(\frac{\sigma^2}{N} + \mu^2))\)
\(\quad\quad\quad = \frac{1}{N}(N\sigma^2 - \sigma^2)\)
\(\quad\quad\quad = \frac{N-1}{N}\sigma^2 \cdots\) “biased estimator”
이에 따라, 표본 분산을 unbiased estimator로 만들기 위해선
\(\hat{\sigma}^2 = \frac{1}{N} \sum^{N-1}_{n=0}(x[n] - \bar{x})^2\) 가 아닌
\(\hat{\sigma}^2 = \frac{1}{N-1} \sum^{N-1}_{n=0}(x[n] - \bar{x})^2\) 을 사용하여야 한다!
Mean squared error(MSE) criterion
MSE Criterion
\(\text{mse}(\hat{\theta}) = E\left[(\hat{\theta} - \theta)^2\right]\)
\(\quad\quad\quad = E\left[\left((\hat{\theta} - E(\hat{\theta})) + (E(\hat{\theta}) - \theta)\right)^2\right]\)
\(\quad\quad\quad = \text{var}(\hat{\theta}) + \left[E(\hat{\theta}) - \theta\right]^2\)
\(\quad\quad\quad = \text{var}(\hat{\theta}) + b^2(\theta)\)
Note that, in many cases, minimum MSE criterion leads to unrealizable estimator, which cannot be written solely as a function of the data, i.e.,
여기선 Sample Mean으로 예시를 들었다.
\(\check{A} = a \frac{1}{N} \sum_{n=0}^{N-1} x[n]\) where \(a\) is chosen to minimize MSE.
Then, \(E(\check{A}) = aA, \quad var(\check{A}) = \frac{a^2 \sigma^2}{N} \quad \Rightarrow \quad \text{mse}(\check{A}) = \frac{a^2 \sigma^2}{N} + (a-1)^2 A^2\)
MSE를 최소화하기 위해 미분을 해보면 \(\frac{d \text{mse}(\check{A})}{d a} = \frac{2a \sigma^2}{N} + 2(a-1) A^2 = 0\) (optimize)
\(\Rightarrow a_{opt} = \frac{A^2}{A^2 + \frac{\sigma^2}{N}} \quad \text{(unrealizable, a function of unknown A)}\) A를 모르기에 사용 불가
하지만 만약 \(\text{mse}(\check{A}) = \frac{a^2 \sigma^2}{N} + (a-1)^2 A^2\) 에서 bias term인 \((a-1)^2 A^2\) 가 0이 된다면?(unbiased 라면) → 최적의 a값을 찾는 것이 가능할 것!
Minimum Variance Unbiased(MVU) Estimator
Any criterion that depends on the bias is likely to be unrealizable → Practically minimum MSE estimator needs to be abandoned Minimum variance unbiased(MVU) estimator
Alternatively, constrain the bias to be zero
Find the estimator which minimizes the variance (minimizing the MSE as well for unbiased case)
\(\text{mse}(\hat{\theta}) = \text{var}(\hat{\theta}) + b^2(\theta)\)
\(\quad\quad\quad= \text{var}(\hat{\theta})\)
→ Minimum variance unbiased (MVU) estimator
Existence of the MVU Estimator
An unbiased estimator with minimum variance for all \(\theta\)
Examples
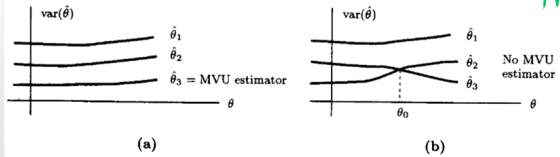
In general, the MVUE estimator does not always exist!
Finding the MVU Estimator
There is no general framework to find MVU estimator even if it exists.
Possible approaches:
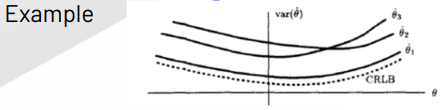
Determine the Cramer-Rao lower bound (CRLB) and check if some estimator satisfies it (challenge)
Apply the Rao-Blackwell-Lehmann-Scheffe (RBLS) theorem (challenge)
Fine unbiased linear estimator with minimum variance (best linear unbiased estimator, BLUE)
Lec 3. Cramer-Rao Lower Bound (CRLB)
Cramer-Rao Lower Bound (CRLB)
The CRLB give a lower bound on the variance of any unbiased estimator. (biased의 경우는 알 수 없다!)
Does not guarantee bound can be obtained.
만약 unbiased estimator의 variance가 CRLB라면 그 estimator는 MVUE.
Estimator Accuracy Considerations
- All information is observed data and underlying PDF → Estimation accuracy depends directly on the PDF.
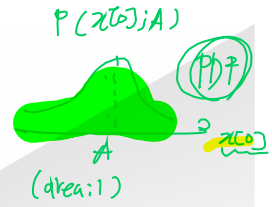
- PDF: 값이 나타날 가능성. 파라미터는 고정! 영역의 넓이는 1
Likelihood (우도): 주어진 데이터가 특정 파라미터 값에 의해 생성되었을 가능성을 나타낸다.
Likelihood는 확률 자체는 아니며, 데이터가 이미 주어졌을 때 그 데이터를 설명하는 파라미터의 값이 얼마나 그럴듯한지를 측정한다.
즉, 파라미터를 고정하지 않고 데이터를 고정한 상태에서 파라미터를 추정하는 과정에서 사용된다.
데이터를 기반으로 가장 그럴듯한 파라미터 값을 찾기 위한 것
영역의 넓이는 1일 필요가 없다!
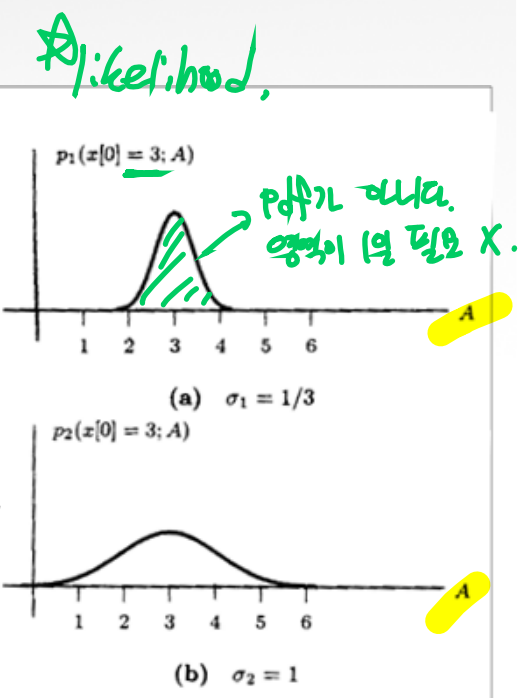
직관적으로 likelihood function의 “sharpness”가 측정의 정확도를 결정한다는 것을 알 수 있다.
likelihood function이 다음과 같다고 하면,
\[p(x[0];A) = \frac{1}{\sqrt{2\pi\sigma^2}}\text{exp}[-\frac{1}{2\sigma^2}(x[0]-A)^2]\]
log-likelihood function은 다음과 같고
\[\text{ln}\ p(x[0];A) = -\text{ln}\sqrt{2\pi\sigma^2}-\frac{1}{2\sigma^2}(x[0]-A)^2\]
A에 대해 두번 미분해주고 마이너스를 붙여주면
\[-\frac{\partial ^2 \text{ln}\ p(x[0];A)}{\partial A^2} = \frac{1}{\sigma^2}, \quad \quad \text{var}(\hat{A}) = \sigma^2 = \frac{1}{-\frac{\partial ^2 \text{ln}\ p(x[0];A)}{\partial A^2}}\]
More appropriate measure is average curvature(곡률, (2차미분 값)), \(-E[\frac{\partial ^2 \text{ln}\ p(x[0];A)}{\partial A^2}]\)
(In general, the \(2^{\text{nd}}\) derivative will depend on \(x[0] \rightarrow\) the likelihood function is a R.V.)
Theorem: CRLB - Scalar Parameter
Let \(p(\mathbf{x}; \theta)\) satisfy the “regularity” condition
\[E_\mathbf{x}[\frac{\partial\text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta}] = 0\quad \text{for all}\ \theta\]
Then, the variance of any unbiased estimator \(\hat{\theta}\) must satisfy
\[\text{var}(\hat{\theta}) \ge \frac{1}{-E_\mathbf{x}[\frac{\partial^2\text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta^2}]} = \frac{1}{E_\mathbf{x}[(\frac{\partial\text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta})^2]}\]
where the derivative is evaluated at the true value \(\theta\) and the expectation is taken w.r.t. \(p(\mathbf{x};\theta).\)
여기서 세번째 텀에서 - 가 사라지는 이유는, 두번째 텀에서 - 가 붙는 이유를 생각해보면 된다.
두번째 텀에서 마이너스가 붙는 이유는 값을 양수로 만들어주기 위함이고, 세번째 텀은 일차 미분의 제곱이므로 자연스럽게 양수이다. 따라서 - 가 사라지게 된다.
Furthermore, an unbiased estimator may be found that attains the bound for all \(\theta\) if and only if
\[\frac{\partial\ \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta} = I(\theta)(g(\mathbf{x})-\theta)\]
for some functions \(g()\) and \(I\). That estimator, which is the MVUE, is \(\hat{\theta} = g(\mathbf{x})\), and the minimum variance is \(\frac{1}{I(\theta)}\)
이렇게 표현이 되면 g() 는 MVUE 이다.
Fisher Information: 추정 정확도를 측정하는 방법. 우도 함수의 곡률이 크면 추정량의 분산이 작고, 더 정확한 추정을 할 수 있음을 의미
정칙성 조건(Regularity Conditions): CRLB가 성립하기 위한 조건으로, 특정 미분 가능성 조건을 만족해야 한다.
CRLB Proof (Appendix 3A)
CRLB for scalar parameter \(\alpha = g(\theta)\) where the PDF is parameterized with \(\theta\).
Consider unbiased estimator \(\hat{\alpha}\), i.e.,
\[E(\hat{\alpha}) = \int \hat{\alpha} p (\mathbf{x}; \theta)d \mathbf{x} = \alpha = g(\theta) \quad \cdots \quad(*)\]
Regularity condition (holds if the order of differentiation and integration may be interchanged)
\[E[\frac{\partial \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta}] = \int \frac{\partial \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta} p(\mathbf{x}; \theta) d \mathbf{x} = 0\]
Differentiating both sides of \((*)\)
\[\int \hat{\alpha} \frac{\partial p (\mathbf{x}; \theta)}{\partial \theta}d \mathbf{x} = \frac{\partial g(\theta)}{\partial \theta}\]
여기서 로그함수에 대한 미분식을 이용하면 \((\frac{\partial}{\partial \theta} \text{ln}\ p(x; \theta) = \frac{1}{p(x;\theta)}\frac{\partial}{\partial \theta} p(x;\theta))\)
\[\Rightarrow \int \hat{\alpha} \frac{\partial \text{ln} p(\mathbf{x};\theta)}{\partial \theta} p(\mathbf{x}; \theta) d \mathbf{x} = \frac{\partial g(\theta)}{\partial \theta}\]
보면 위의 Expectation 식과 동일함을 알 수 있다.
By using regularity condition,
\[\int (\hat{\alpha} - \alpha) \frac{\partial \text{ln}\ p(\mathbf{x};\theta)d\mathbf{x}}{\partial \theta}p(\mathbf{x}; \theta) d\mathbf{x} = \frac{\partial g(\theta)}{\partial \theta}\]
By using Cauchy-Schwarz inequality, (코시 슈바르츠 부등식은 아래에 서술)
\[(\frac{\partial g(\theta)}{\partial \theta})^2 \le \int (\hat{\alpha} - \alpha)^2 p (\mathbf{x};\theta) d\mathbf{x} \int (\frac{\partial \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta})^2 p(\mathbf{x}; \theta) d \mathbf{x}\]
\[\rightarrow \text{var}(\hat{\alpha}) \ge \frac{(\frac{\partial g(\theta)}{\partial \theta})^2}{E[(\frac{\partial \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta})^2]}\]
By differentiating the regularity condition,
\[\frac{\partial}{\partial \theta} \int \frac{\partial \text{ln}\ p(\mathbf{x}; \theta)}{\partial \theta} p (\mathbf{x}; \theta) d \mathbf{x} = 0\]
\[\int [\frac{\partial^2 \text{ln} p (\mathbf{x};\theta)}{\partial \theta^2} p (\mathbf{x}; \theta) + \frac{\partial \text{ln} p (\mathbf{x}; \theta)}{\partial \theta} \frac{\partial p(\mathbf{x}; \theta)}{\partial \theta}]d \mathbf{x} = 0\]
\[- E[\frac{\partial ^2 \text{ln} p(\mathbf{x}; \theta)}{\partial \theta^2}] = \int \frac{\partial \text{ln} p(\mathbf{x};\theta)}{\partial \theta} \frac{\partial \text{ln} p (\mathbf{x}; \theta)}{\partial \theta} p (\mathbf{x};\theta)d \mathbf{x} = E[(\frac{\partial \text{ln} p (\mathbf{x}; \theta)}{\partial \theta})^2]\]
\[\rightarrow \text{var}(\hat{\alpha}) \ge \frac{(\frac{\partial g(\theta)}{\partial \theta})^2}{E[(\frac{\partial \text{ln} p(\mathbf{x}; \theta)}{\partial \theta})^2]} = \frac{(\frac{\partial g(\theta)}{\partial \theta})^2}{-E[\frac{\partial^2 \text{ln} p(\mathbf{x}; \theta)}{\partial \theta^2}]}\]
If \(\alpha = g(\theta) = \theta\),
\[\text{var}(\hat{\theta}) \ge \frac{1}{-E[\frac{\partial^2 \text{ln} p (\mathbf{x}; \theta)}{\partial \theta^2}]} = \frac{1}{E[(\frac{\partial \text{ln} p(\mathbf{x}; \theta)}{\partial \theta})^2]}\]
Condition for equality :
\[\frac{\partial \text{ln} p (\mathbf{x}; \theta)}{\partial \theta} = \frac{1}{c}(\hat{\alpha}- \alpha)\]
If \(\alpha = g(\theta) = \theta\),
\[\frac{\partial \text{ln} p (\mathbf{x}; \theta)}{\partial \theta} = \frac{1}{c}(\hat{\theta}- \theta)\]
To determine \(c(\theta)\),
\[\frac{\partial^2 \text{ln} p (\mathbf{x}; \theta)}{\partial \theta^2} = - \frac{1}{c(\theta)} + \frac{\partial(\frac{1}{c(\theta)})}{\partial \theta}(\hat{\theta} - \theta)\]
\[- E [\frac{\partial^2 \text{ln} p(\mathbf{x}; \theta)}{\partial \theta^2}] = \frac{1}{c(\theta)} = I(\theta)\]
- Cauchy-Schwarz Inequality?
\[[\int w(\mathbf{x}) g(\mathbf{x}) h(\mathbf{x}) d \mathbf{x}]^2 \le \int w(\mathbf{x}) g^2 (\mathbf{x}) d \mathbf{x} \int w(\mathbf{x}) h^2(\mathbf{x}) d \mathbf{x}\]
Arbitary function \(g(\mathbf{x})\) and \(h(\mathbf{x})\), while \(w(\mathbf{x}) \ge 0\) for all \(\mathbf{x}\).
Equality holds in and only if
\[g(\mathbf{x}) = c\ h(\mathbf{x})\]